

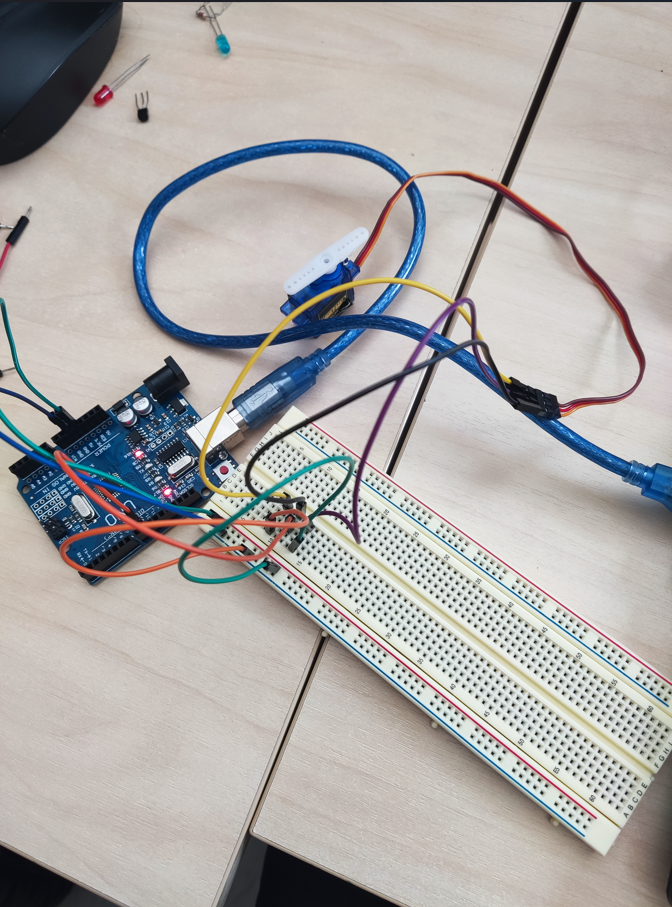
Тема 4.2: Эксперимент с использованием сервопривода
Опыт работы с серводвигателем/использование серводвигателя на 180 градусов
#include <Servo.h>
Servo servo1; // Peame looma servo objekti nimega servo1 (объект управления сервоприводом)
void setup()
{
// Сейчас мы прикрепим (attach) объект servo1 к цифровому пину 9. Если вы собираетесь управлять более чем одним
// сервоприводом, Вы должны прикрепить каждый новый объект серво к своему, отдельному порту, причем это порт должен быть цифровым.
servo1.attach(9); //ütleme Arduinole, et infosuhtlus servo-objektiga servo käib läbi klemmi number 9. Tegu on digitaal-klemmiga--PWM digitaalne osa! Kontrollime, kas skeemil kasutame sama klemmi.
}
void loop()
{
int position;
servo1.write(90); //pööramise nurk =90
delay(1000);
servo1.write(180); //pööramise nurk =180
delay(1000);
servo1.write(0); //pööramise nurk =0
delay(1000);
// servo positsiooni muutmine väike kiirusega pärisuunas:
for(position = 0; position < 180; position += 2)
{
servo1.write(position); // positsiooni muutmine
delay(20);
}
// servo positsiooni muutmine väike kiirusega vastupäeva:
for(position = 180; position >= 0; position -= 1)
{
servo1.write(position); // positsiooni muutmine
delay(20);
}
}

https://drive.google.com/file/d/1fc4MansE90ox6Vahx1nKP8EE1yNaW_QJ/view?usp=sharing
