

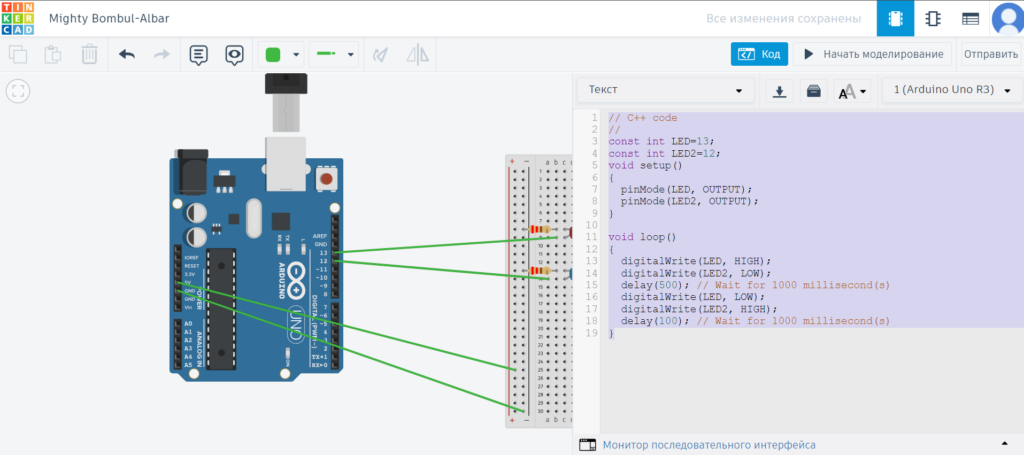
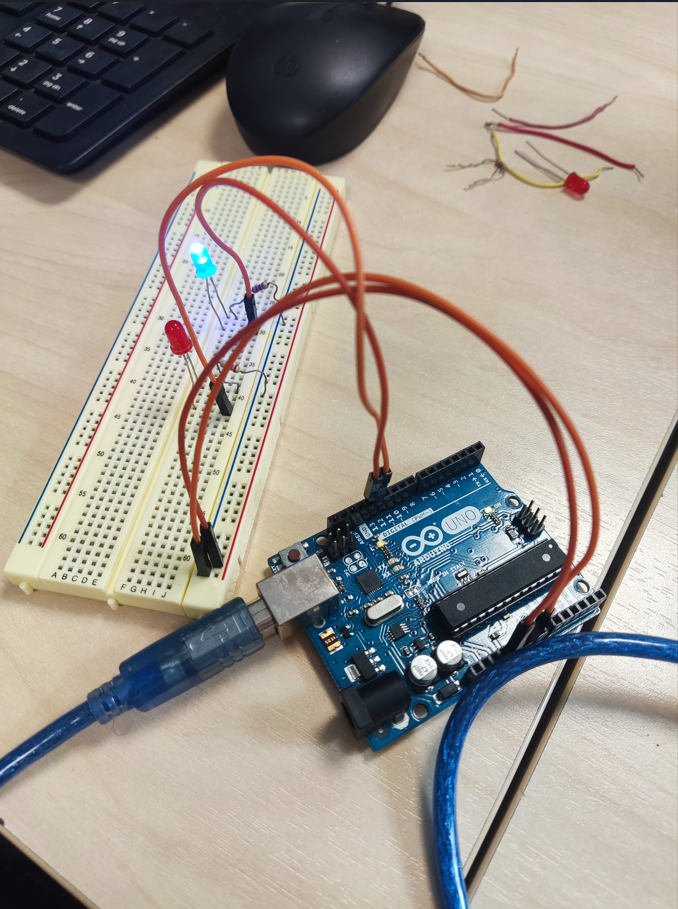
Тема 1: Использование светодиодов и RGB-светодиодов
// C++ code
//
const int LED=13;
const int LED2=12;
void setup()
{
pinMode(LED, OUTPUT);
pinMode(LED2, OUTPUT);
}
void loop()
{
digitalWrite(LED, HIGH);
digitalWrite(LED2, LOW);
delay(500); // Wait for 1000 millisecond(s)
digitalWrite(LED, LOW);
digitalWrite(LED2, HIGH);
delay(100); // Wait for 1000 millisecond(s)
}
https://drive.google.com/file/d/1dd2N4LWDAyEg-G0CsIdr7duTHS1Ud15u/view?usp=drive_link
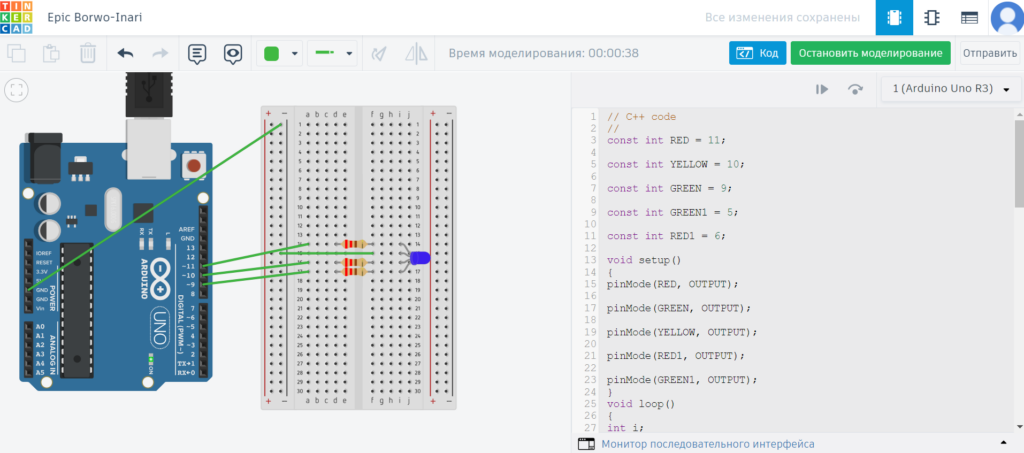
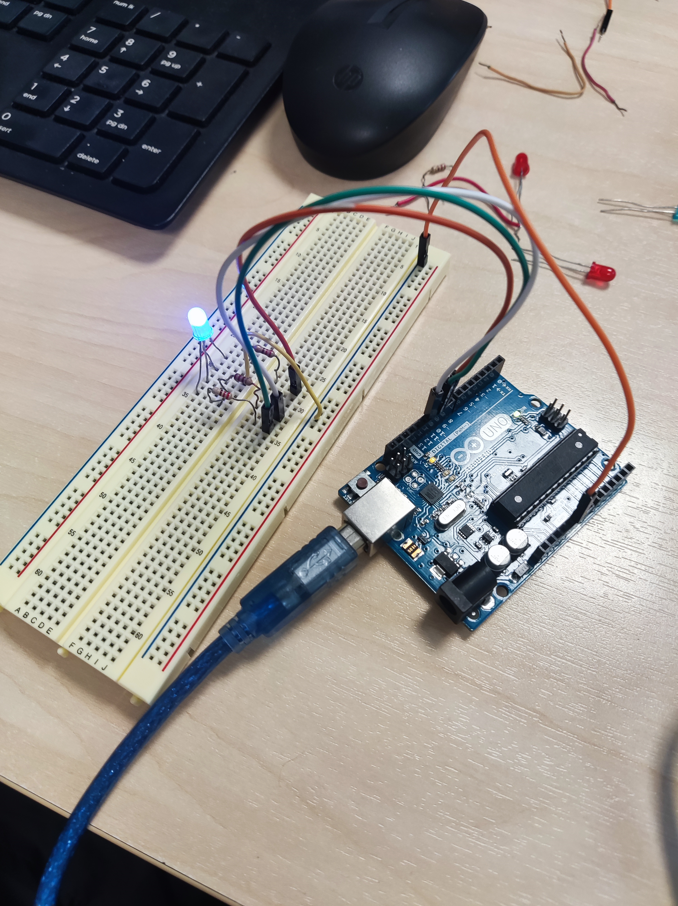
// C++ code
//
// C++ code
//
const int RED = 11;
const int YELLOW = 10;
const int GREEN = 9;
const int GREEN1 = 5;
const int RED1 = 6;
void setup()
{
pinMode(RED, OUTPUT);
pinMode(GREEN, OUTPUT);
pinMode(YELLOW, OUTPUT);
pinMode(RED1, OUTPUT);
pinMode(GREEN1, OUTPUT);
}
void loop()
{
int i;
for (int i=0; i<4;i++)
{
digitalWrite(RED, HIGH);
digitalWrite(YELLOW, LOW);
digitalWrite(GREEN, LOW);
digitalWrite(GREEN1, HIGH);
digitalWrite(RED1, LOW);
delay(500);
digitalWrite(RED, LOW);
digitalWrite(YELLOW, HIGH);
digitalWrite(GREEN, LOW);
delay(300);
digitalWrite(RED, LOW);
digitalWrite(YELLOW, LOW);
digitalWrite(GREEN, HIGH);
digitalWrite(RED1, HIGH);
digitalWrite(GREEN1, LOW);
delay(500);
if (i==1)break;
{
int a;
for (int a=0; a<4;a++)
{
digitalWrite(RED, LOW);
digitalWrite(YELLOW, HIGH);
digitalWrite(GREEN, LOW);
digitalWrite(GREEN1, LOW);
digitalWrite(RED1, LOW);
delay(200);
digitalWrite(RED, LOW);
digitalWrite(YELLOW, LOW);
digitalWrite(GREEN, LOW);
digitalWrite(GREEN1, LOW);
digitalWrite(RED1, LOW);
delay(200);
}
}
}
}
https://drive.google.com/file/d/1da917YGwQtzOYCT6ZKpbwnscNFH3ihvP/view?usp=drive_link
// C++ code
//
// Определяем пины для светодиодов
const int auto_red_pin = 2;
const int auto_yellow_pin = 3;
const int auto_green_pin = 4;
const int pedestrian_red_pin = 5;
const int pedestrian_green_pin = 6;
void setup()
{
pinMode(auto_red_pin, OUTPUT);
pinMode(auto_yellow_pin, OUTPUT);
pinMode(auto_green_pin, OUTPUT);
pinMode(pedestrian_red_pin, OUTPUT);
pinMode(pedestrian_green_pin, OUTPUT);
}
void loop()
{
digitalWrite(pedestrian_green_pin, HIGH);
digitalWrite(auto_red_pin, HIGH);
delay(3000); // Wait for 1000 millisecond(s)
digitalWrite(auto_red_pin, LOW);
digitalWrite(pedestrian_green_pin, LOW);
delay(3000); // Wait for 1000 millisecond(s)
digitalWrite(auto_yellow_pin, HIGH);
digitalWrite(pedestrian_red_pin, HIGH);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(auto_yellow_pin, LOW);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(auto_yellow_pin, HIGH);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(auto_yellow_pin, LOW);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(auto_yellow_pin, HIGH);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(auto_yellow_pin, LOW);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(auto_green_pin, HIGH);
delay(3000); // Wait for 1000 millisecond(s)
digitalWrite(auto_green_pin, LOW);
digitalWrite(pedestrian_red_pin, LOW);
delay(3000); // Wait for 1000 millisecond(s)
}

https://drive.google.com/file/d/1dKpZAPkHFMkkUuqV1uxNXVuxyGT5YTfm/view?usp=drive_link
